Von uns umgesetzte Projekte
ARTUS UGV
ARTUS ist ein unbemanntes Bodenfahrzeug (UGV – Unmanned Ground Vehicle) mit herausragenden Geländefähigkeiten. Seine schmalen Abmessungen ermöglichen mühelose Fortbewegung auf engen Pfaden, in Wäldern und Tunneln. Dank der 4-Rad-Lenkung und des 4-Rad-Antriebs mit individueller Raddrehzahlsteuerung bietet es maximale Traktion und Anpassungsfähigkeit auf verschiedenen Untergründen. Das automatische Nivelliersystem (Patent angemeldet) gewährleistet eine stabile horizontale Plattform, zudem kann das Chassis für das Be- und Entladen und für das Bewältigen von unwegsamem Gelände und das Durchwaten von Gewässern angepasst werden kann. ARTUS ist äußerst manövrierfähig und eignet sich für den Transport von Gütern, Munition und verletzten Personen, sowie für Aufklärungsmissionen in anspruchsvollem Terrain.
4-Rad-Lenkung für maximale Manövrierbarkeit in alle Richtungen:




Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
PGlmcmFtZSB0aXRsZT0iWW91dHViZSB2aWRlbyBwbGF5ZXIiIHNyYz0iLy93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvT21oQ1RUVmtZX0U/b3JpZ2luPWh0dHBzOi8vY2hhcmlzbWF0ZWMuYXQmY29udHJvbHM9MSIgYWxsb3dmdWxsc2NyZWVuPSIxIiBsb2FkaW5nPSJsYXp5Ij48L2lmcmFtZT4=
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
PGlmcmFtZSB0aXRsZT0iWW91dHViZSB2aWRlbyBwbGF5ZXIiIHNyYz0iLy93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvdXlBMXlyRm5jM28/b3JpZ2luPWh0dHBzOi8vY2hhcmlzbWF0ZWMuYXQmY29udHJvbHM9MSIgYWxsb3dmdWxsc2NyZWVuPSIxIiBsb2FkaW5nPSJsYXp5Ij48L2lmcmFtZT4=
Doculus Lumus
Doculus Lumus® ist ein mobiles Dokumentenprüfgerät, das speziell für Frontliner – also alle Personen, die als erstes ein Personaldokument prüfen – entwickelt wurde. Damit wird eine umfassende Prüfung direkt vor Ort möglich, an der Grenze, auf der Autobahn, im Zug oder am Flughafen. Meist bleiben nur 30 Sekunden für die Prüfung eines Dokuments und um zu entscheiden, ob eine Fälschung vorliegt oder nicht. Und dafür braucht man umfangreiche und leistungsstarke Lichtfunktionen und einen eingebauten RFID-Chipleser.


Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
PGlmcmFtZSB0aXRsZT0iWW91dHViZSB2aWRlbyBwbGF5ZXIiIHNyYz0iLy93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvNzAzTk9yX3ZGdEU/b3JpZ2luPWh0dHBzOi8vY2hhcmlzbWF0ZWMuYXQmY29udHJvbHM9MSIgYWxsb3dmdWxsc2NyZWVuPSIxIiBsb2FkaW5nPSJsYXp5Ij48L2lmcmFtZT4=
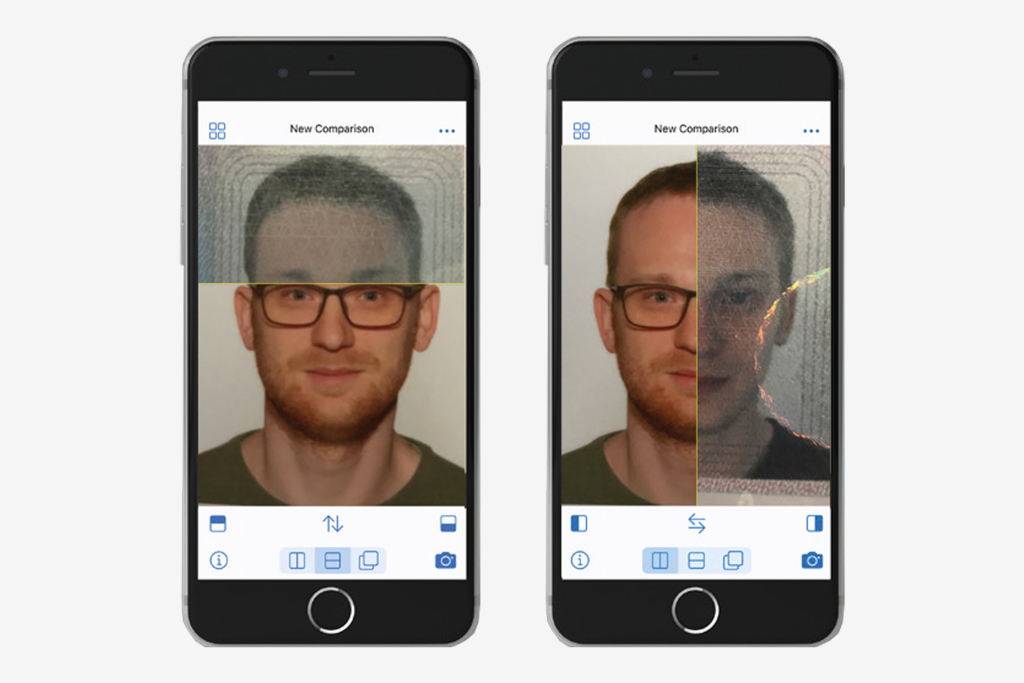
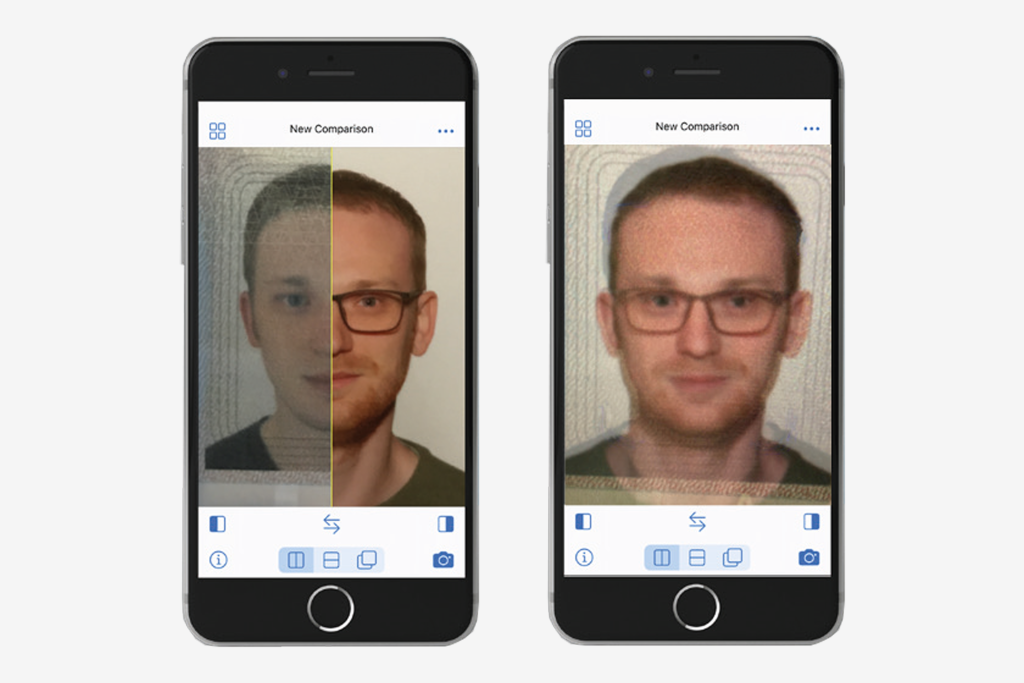
Smart Face Match
Sie müssen beruflich oft Ausweise kontrollieren? Wie stellen Sie sicher, dass die Person vor Ihnen und das Gesicht im Ausweis tatsächlich identisch sind? Machen Sie jeweils ein Foto und verschaffen Sie sich Gewissheit! Smart FaceMatch führt Sie in wenigen Schritten zu zwei angepassten Bildern, bei denen Sie die Gesichtshälften nebeneinander legen oder beide Bilder überblenden können. Die Teilung ist horizontal oder vertikal verschiebbar und die Transparenz der Überblendung regelbar. Denn die Abstände von Augen, Nase und Kinn sind charakteristisch für eine Person, egal ob mit Bart oder anderer Frisur. So können Sie leicht erkennen, ob etwas nicht übereinstimmt. Zu Dokumentationszwecken kann das Ergebnis abgespeichert werden.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
PGlmcmFtZSB0aXRsZT0iWW91dHViZSB2aWRlbyBwbGF5ZXIiIHNyYz0iLy93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvOXkyOThieEJ2d2c/b3JpZ2luPWh0dHBzOi8vY2hhcmlzbWF0ZWMuYXQmY29udHJvbHM9MSIgYWxsb3dmdWxsc2NyZWVuPSIxIiBsb2FkaW5nPSJsYXp5Ij48L2lmcmFtZT4=
RAMVoS
RAMVoS, ein fahrerloses Transportsystem von charismaTec und Brunner Maschinenbau, ist eine zuverlässige Lösung für die Produktionslogistik in der Industrie. Mit Nutzlasten von bis zu 600 kg (RAMVoS 600) bzw. 1.200 kg (RAMVoS 1200) bietet das System Flexibilität in der Anwendung. Das Fahrzeug ist modular aufgebaut und unterstützt verschiedene Aufbauten, die an den speziellen Anwendungsbereich angepasst werden können. RAMVoS zeichnet sich durch eine hohe Antriebsleistung, eine Positioniergenauigkeit von 10 mm / 1°, induktives Laden und ein robustes Fahrwerk aus. Mit einer Maximalgeschwindigkeit von 2 m/s und der liniengeführten Laser-SLAM-Navigation eignet es sich für den Einsatz in allen Hallensituationen und dank innovativem Schlechtwegefahrwerk auch für alle Hallenböden, insbesondere auch in Brownfield-Anlagen.



Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
PGlmcmFtZSB0aXRsZT0iWW91dHViZSB2aWRlbyBwbGF5ZXIiIHNyYz0iLy93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvVzNLVkpoZGx6cG8/b3JpZ2luPWh0dHBzOi8vY2hhcmlzbWF0ZWMuYXQmY29udHJvbHM9MSIgYWxsb3dmdWxsc2NyZWVuPSIxIiBsb2FkaW5nPSJsYXp5Ij48L2lmcmFtZT4=
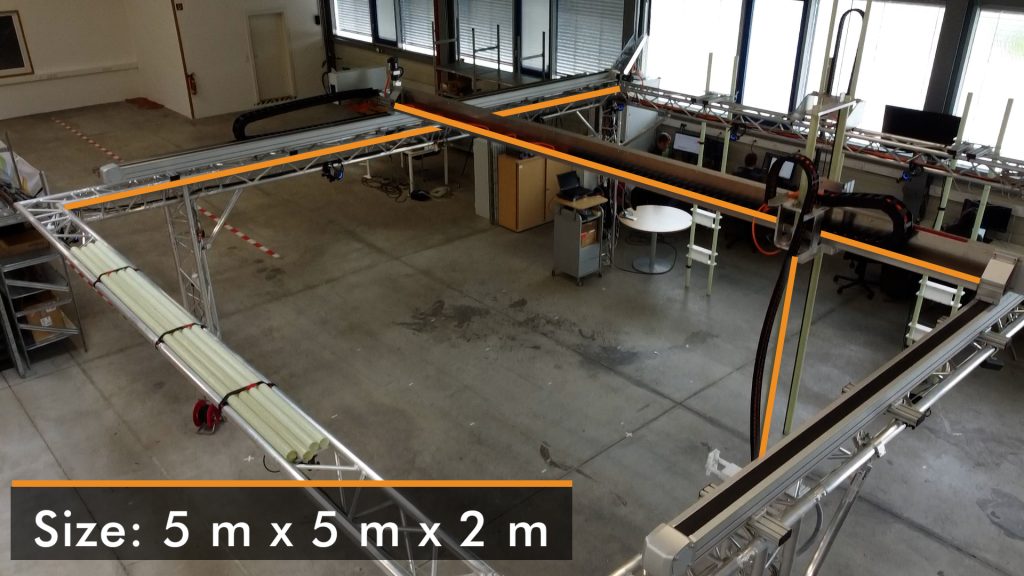
Roboter-Messzelle
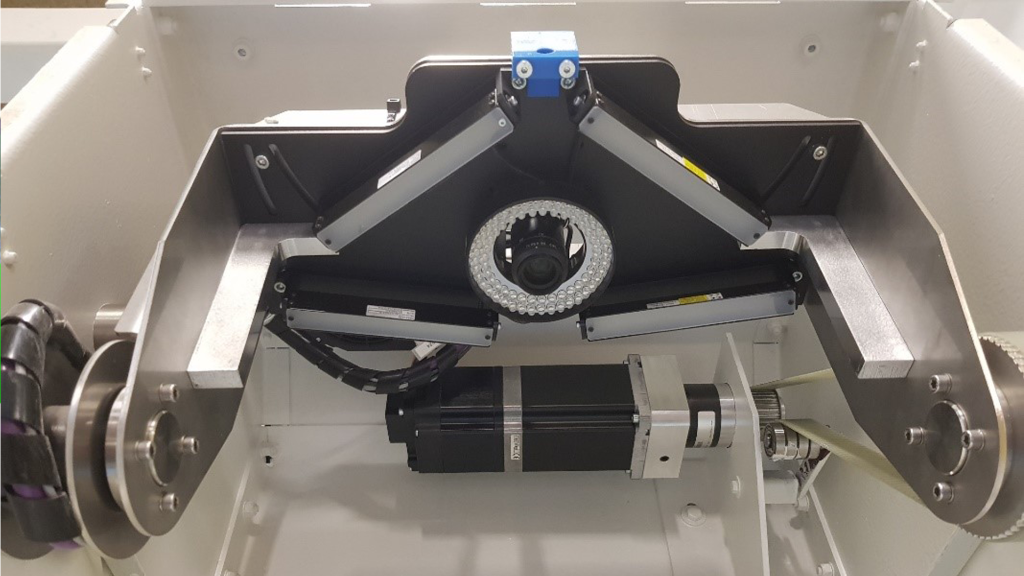
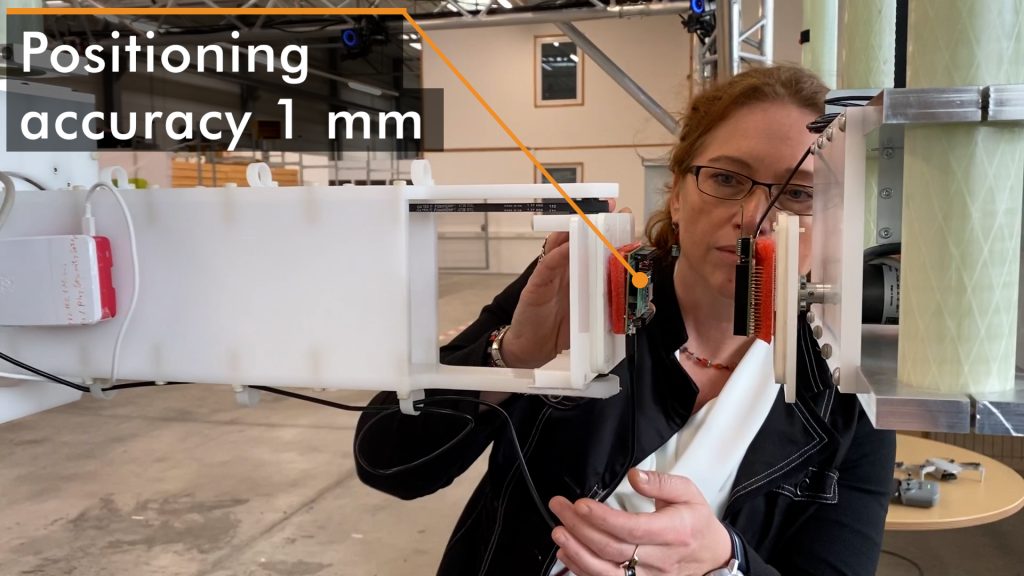
Die hochautomatisierte Roboter-Messzelle für Ultra Wideband (UWB) wurde entwickelt, um präzise und effiziente Messungen in einem Bereich von 5 m x 5 m x 2 m durchzuführen. Die Roboterzelle ist mit insgesamt 6 dynamischen und 2 statischen Achsen ausgestattet, die eine umfassende und flexible Bewegungsbereichsabdeckung gewährleisten. Mithilfe der eingesetzten Speicherprogrammierbaren Steuerung (SPS) und Servomotoren wird eine Positionierungsgenauigkeit von 1 mm erreicht. Die Steuerung erfolgt über TCP/IP, damit lassen sich auch Langzeitversuche einfach automatisieren und das System kann auch aus der Ferne gesteuert werden.
Der Arm der Messzelle ist auf den ersten 600 mm komplett metallfrei konstruiert, um jegliche Störung der elektromagnetischen Funkwellen zu vermeiden.
0 m x 0 m x 0 m
Messbereich
0 + 0
Achsen
30 mm
Genauigkeit
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
PGlmcmFtZSB0aXRsZT0iWW91dHViZSB2aWRlbyBwbGF5ZXIiIHNyYz0iLy93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvaVlqNHlXZkZQN0U/b3JpZ2luPWh0dHBzOi8vY2hhcmlzbWF0ZWMuYXQmY29udHJvbHM9MSIgYWxsb3dmdWxsc2NyZWVuPSIxIiBsb2FkaW5nPSJsYXp5Ij48L2lmcmFtZT4=
OBCC – Objective Boundary Condition Check
Qualitätskontrolle von Lederlenkrädern: Entwicklung und elektrischer Aufbau sowie Programmierung des vollautomatischen Qualitätskontrollsystems, hergestellt und vertrieben von einer Partnerfirma:
- Inspektion des Leders und der Verarbeitung (A- und B-Seite sowie Lenkradkranz mit mehreren Lichtquellen)
- Maschinelles Bildverarbeitungssystem für die Qualitätsbewertung
- Visualisierung über Webinterface